


Bem-vindos à FNR 2024
Festival Nacional de Robótica
O Festival Nacional de Robótica 2024 (FNR’2024) decorrerá no Pavilhão Municipal de Paredes de Coura sendo promovido pela EPRAMI e pela Sociedade Portuguesa de Robótica (SPR), contando com o apoio da Agência Nacional para a Cultura Científica e Tecnológica - Ciência Viva e com o apoio logístico da Câmara Municipal de Paredes de Coura para a realização do evento.




O Nosso Programa - 2024 Workshops, Atividades, Competições para todas as idades...
Workshops, Atividades, Competições para todas as idades...
(em atualização)

Organização Maio 03, 2024 Período-Manhã
Equipas Maio 03, 2024 Período-Manhã


STEAM EDUCATION
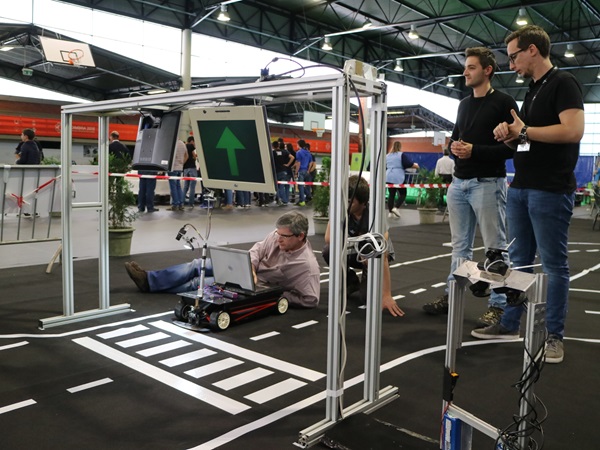
As competições robóticas destinam-se a promover o espírito inovador, empreendedor nas crianças e jovens através de métodos ativos de ensino, assim como a aquisição de competências transversais, divulgando também esta área junto do público em geral.
20+
Atividades para todos.
Inscreve-te Já!
Custo e Prazos de Inscrição
Leia os detalhes sobre os custos e as datas de inscrição na seção abaixo.
Ligas Junior - até 19 anos e até Ensino Secundário
125€ / até 19 de abril
-
Registo de uma equipa (até 4 membros)
- Pequeno-almoço, almoço e jantar nos 3 dias da competição;
- Alojamento em dormitório com colchões;
- Certificado de participação.
Ligas Major (Todas as ligas excepto Robocup Soccer MSL e @Home)
250€ / até 19 de abril
-
Registo de uma equipa
- Pequeno-almoço, almoço e jantar nos 3 dias da competição;
- Alojamento em dormitório com colchões;
- Certificado de participação.
Ligas Major (Robocup Soccer MSL e @Home)
350€ / até 19 de abril
-
Registo de uma equipa
- Pequeno-almoço, almoço e jantar nos 3 dias da competição;
- Alojamento em dormitório com colchões;
- Certificado de participação.



Contactar
Necessita ajuda?
Contactar
Entre em contato e diga-nos como podemos ajudar.
Partners & Sponsers
Conheça os nossos fantásticos parceiros e patrocinadores.

Município de Paredes de Coura
Parceiro
EPRAMI
Parceiro
Sociedade Portuguesa de Robótica
Parceiro
Ciência Viva
Parceiro

The design, engineering, art, and science of programming
Join us for Eventor Collaborative: Virtual Sessions on October 2023

Join 3,500+ developers, engineers,
designers and executives
“Thank you for running the event so smoothly – I had a great time, not only presenting, but also watching other sessions and interacting with attendees.”

“Thank you for running the event so smoothly – I had a great time, not only presenting, but also watching other sessions and interacting with attendees.”

Stella Smith
Eventor Live Max“Thank you for running the event so smoothly – I had a great time, not only presenting, but also watching other sessions and interacting with attendees.”
Stella Smith
Eventor Live Max“Thank you for running the event so smoothly – I had a great time, not only presenting, but also watching other sessions and interacting with attendees.”

Stella Smith
Eventor Live Max“Thank you for running the event so smoothly – I had a great time, not only presenting, but also watching other sessions and interacting with attendees.”

Stella Smith
Eventor Live Max“Thank you for running the event so smoothly – I had a great time, not only presenting, but also watching other sessions and interacting with attendees.”

Stella Smith
Eventor Live Max“Thank you for running the event so smoothly – I had a great time, not only presenting, but also watching other sessions and interacting with attendees.”
Stella Smith
Eventor Live Max
Conference news and event industry trends
 VIEW
VIEW
Eventos
Workshops
Quer saber mais informações sobre os 3 Workshops: W1) EDUCAMP EU-RATE; W2) Futebol Robótico CamTracked; W3) Rescue Simulation (Webots-Erebus) clique aqui !!
Continue Reading VIEW
VIEW
Conference 2023
The Business of Events confirms ICC Wales as latest official partner
The Business of Events has confirmed ICC Wales as its latest official partner for its 2022 program. ICC Wales joins the Department for Digital, Culture, Media & Sport. Eventor Collaborative,…
Continue Reading VIEW
VIEW
Conference 2023
Events Industry Council announces Recipients of 2022 Global Awards
The Events Industry Council (EIC), the global voice of the business events industry, has today announced the Recipients of its annual Global Awards. Join 5,000+ dev and designers professionals for…
Continue Reading